of the shovel operator’s interface with
tooth monitoring and payload
monitoring functionality integrated is
shown in Figure 4. Following an
encroachment into the warning zone,
the operator of the shovel is presented
with a short audible alarm, visual
indications (such as the blinking
symbols on the relevant camera views),
and the colour orange showing on the
bird’s eye view. At the same time,
slowly flashing warning lights are
directed at the operator of the
encroaching equipment.
When a piece of equipment enters
the collision zone, the operator of the
shovel is presented with similar but
much more urgent warning alarms.
The short alarm is replaced with a
longer and faster alarm tone and the
collision zone of the shovel in the
bird’s eye view is indicated in red. The
corresponding external warning lights
also flash rapidly at the encroaching
equipment.
The warning zone is sized so that
haul trucks spotted at an appropriate
distance do not cause a warning.
However, haul trucks and cleanup
equipment that are too close will first
produce a warning and, if they
continue to approach, a collision alarm
will be generated. Through warning
zone sizing and differentiation of
alarm importance, the system is able
to drastically reduce the number of
nuisance alarms. This allows operators
to focus on their operation until an
alarm is given, at which point they can
quickly confirm the encroachment
using the intuitive visualisation.
Case study
In a recent installation at a Peruvian
copper mine, the ShovelMetrics
proximity detection system was
carefully analysed. After installation
and commissioning on an RH200
hydraulic face shovel, the system was
setup to record logs but provide no
visual or audible alarms. The system
would store a log every time a piece of
equipment entered either the warning
or collision zone. This configuration
was run for two weeks to create a
baseline dataset. In parallel, shovel
and auxiliary equipment operators
were trained on the usage of the
system and the meaning of the alarms.
After training was complete, the
system alarms were fully enabled and
another two weeks of data was
recorded.
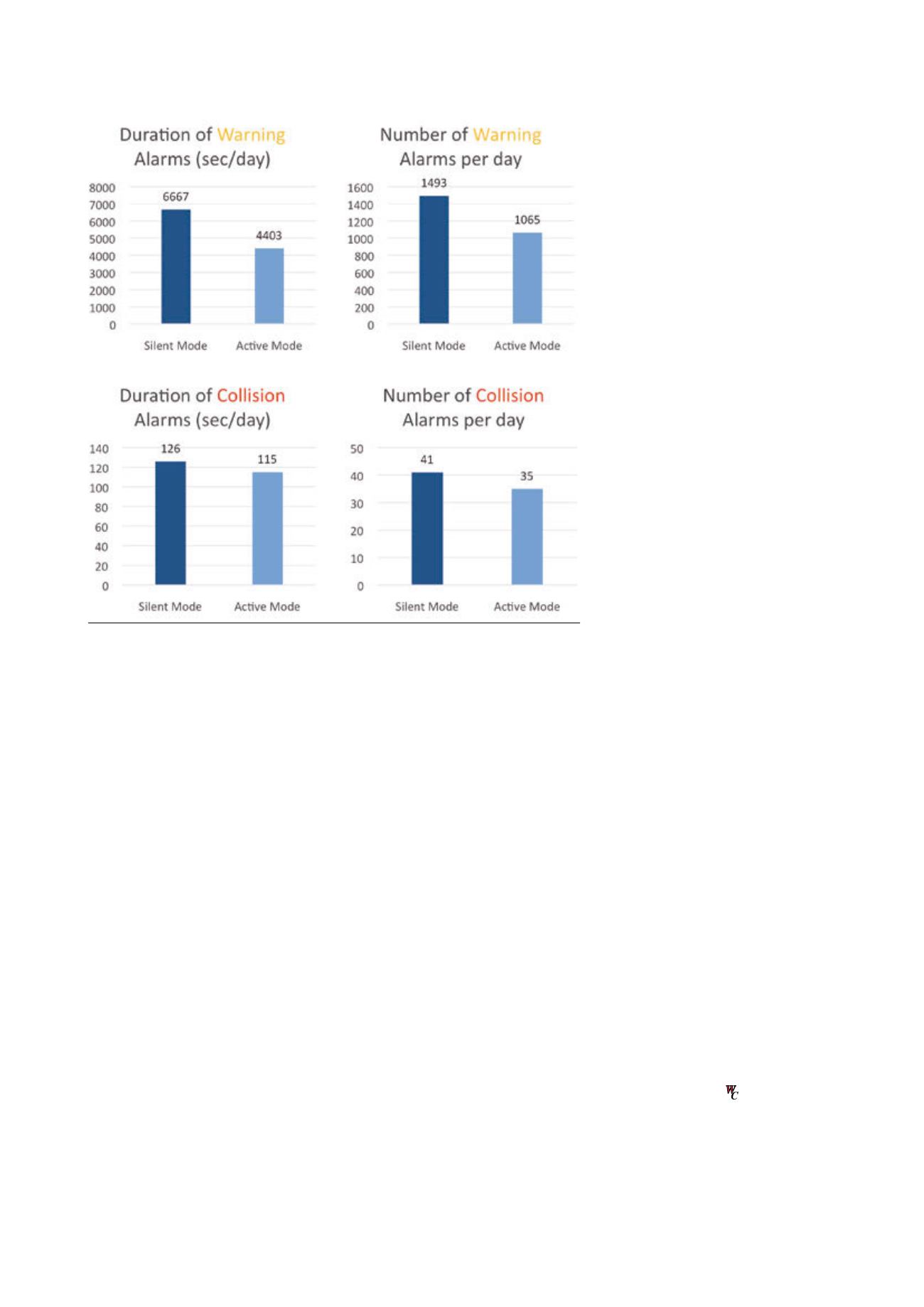
These two sets of data allowed the
comparison of the operation before and
after a collision avoidance system was
present. It was found that the duration
of time spent in the warning zone
dropped by 34%, while the number of
warning alarms per day were also
reduced by 29% (Figure 6). The drop in
time spent in the warning zone
suggests that auxiliary equipment
operators were able to determine when
they had crossed into the zone and
quickly moved to a safe distance. The
reduction in warning alarms suggests
that the operators became more aware
of the boundary and as a result crossed
into the warning area less frequently. In
general, an overall reduction in time
and frequency of warning and collision
zone entries indicates a positive
increase in operator awareness.
Conclusion
Serious collisions between large
mining shovels and auxiliary
equipment have the potential to cause
fatalities and can have a significant
economic impact on the mine. The
environment around the shovel has
several contributing factors that make
safe operation more difficult: heavy
dust, large blind spots, a wide swing
radius and the need for equipment to
work in close proximity all increase
the chance of incidents. The
ShovelMetrics system constantly
monitors the shovel's surroundings,
looking for equipment that is within
the swing path of the shovel. This
allows the operator to focus on
loading knowing that potential danger
can be quickly addressed.
ShovelMetrics increases the safety of
the opencast excavation without
reducing the efficiency of
loading operations.
References
1. HANSON, C. “Remote Health
Monitoring for Mining Shovels”,
Engineering and Mining Journal
. 2009.
Figure 6.
Charts showing the change in duration and frequency of warning and collision
alarms.
32
|
World Coal
|
September 2014


