December
2014
Oilfield Technology
|
19
Soundproof covers aremandatory for
operations in some areas, such as the European
Economic Area.
Noise assessment in the field is not easy,
as it is highly dependent onmeasurement
distance and location, surrounding noise,
engine load, engine cooler and air conditioning
operation. Manufacturers do not provide
much information on vibrator noise levels.
Nonetheless, without an engine soundproof
cover, it is common to have noise levels above
95 dB 1m fromthe engine, and 85 dB 7maway.
Such levels of noise become an important issue
while operating either in populated or fragile
animal habitats.
On theNomad 15 vibrator, noise reduction
ismaximised by themeans of an included
soundproof engine housing, aswell as the
IPMsystemthat reduces engine noise during stand‑by periods. The
maximumnoise level is reduced to 77 dB just 7m fromthe side of the
vibrator, and less than 70 dB 7m in front of the vibrator.
Accessibility and broadband capacity
Nomad 15was developed to offer excellent accessibility. Its compact
dimensions (Table 1) andmanoeuvrability, excellent turning radius (7.81m
curb‑to‑curb, 9.86mwall‑to‑wall) combinedwith four directional wheels
offering several steeringmodes (Figure 3) for ease of access to the toughest
areas, usually closed to larger or heavier vibrators. The differentmodes
offer the best solution for navigating difficult terrain and reduce the need
for awinch or external assistancewhen operating in soft soil conditions.
Its powerful hydraulic transmissionmakes it a capable climber of even the
steepest slopes (over 55%).
To foster the development of broadband acquisition, Nomad 15 offers
high performance at both lowand high frequencies. TheNomad 15 can
initiate a sweep at 1Hzwith reduced force; reaching full force at 7Hz.
High frequencies of up to 400Hz are achievable, depending on ground
characteristics, and aremade possible by an extra stiff circular baseplate.
The hydraulic peak force (17 364 lbf) is higher than the hold‑downweight
(16 135 lbf) to compensate for themass‑to‑baseplate phase shift above the
ground cutoff frequency. High frequencies are particularly beneficial when
imaging shallow targets.
Monitoringmarinemammals
Over the years, there has been a growing number of regulatory agencies
requiring or encouraging the use of passive acousticmonitoring (PAM)
for real time detection and localisation of marinemammalswithin the
exclusion zone (EZ) in order tominimise the potential environmental
impact frommarine seismic sources.
The exclusion zone – usually defined as the radius around the seismic
sourceswithinwhichmitigationmeasures, such as seismic source
shutdown, are implemented – is generally set at 500m.
Current PAMsystems are typically comprised of a dedicated towed
array containing several hydrophones, an onboard signal conditioning and
data acquisition device, all of which is connected to a dedicated computing
system.
Although the potential value of PAMas a real timemitigation tool
has been recognised bymost regulatory agencies, the currently available
PAMsystems, whilewell suited for research and scientific use, are limited
as tools formarine seismic surveys:
On the acquisition vessel, themanagement of a dedicated PAM towed
array poses safety concerns for operators during the deployment and
retrieval phases. The current PAMsystems also greatly increase the risk of
entanglement with lead‑ins and streamers, which increases the likelihood
of unnecessary downtime and equipment replacement costs for the
seismic contractor.
PAM towed arrays are usually deployed a fewhundredmeters from
the back deck of the seismic vessel. The boat‑induced noisemasks the
vocalisation of marinemammals and the vessel wash acts as an acoustic
barrier, both of which hinder the system’s ability to detect cetaceans.
Commercially available PAMsystems typically rely on a single linear
antenna containing a limited number of hydrophones, which leads to
several restrictions in terms of systemperformance:
Ì
Ì
Limited forward detection/localisation performance, which is a
direction of particular interest, and the inability to solve the
port/starboard localisation ambiguity.
Ì
Ì
The limited number of hydrophones may not provide enough
information for localisation in some cases, and does not offer any
redundancy in case of hydrophonemalfunction.
Ì
Ì
The use of a single antenna results in operational downtime during
night‑time in case of entanglement. Indeed, PAM being the only
mammal‑monitoring tool available at night as marinemammal
observers cannot operate; its unavailability leads contractors to wait
until day time to resume operations.
Ì
Ì
Towed arrays do not provide any QC status concerning their state of
health, elevating the risk of operating amalfunctioning system.
Ì
Ì
Poor low frequency response, whichmay exclude some whale species
frombeing identified through acoustic monitoring.
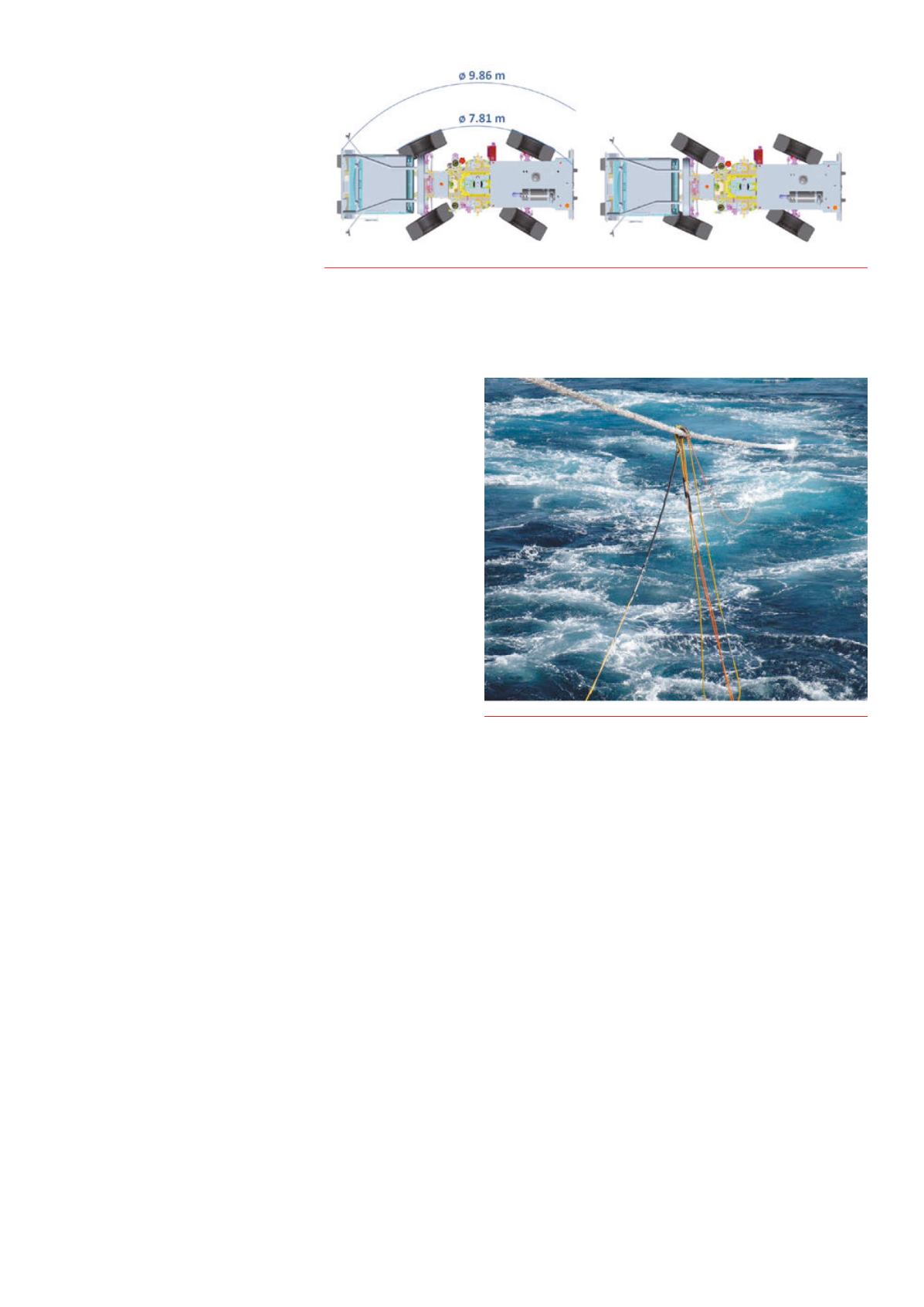
Figure 3.
Directional steeringmodes: inaddition to the standardmode, where only the front wheels
provide steering, theNomad 15 has two special directional modes to ease access to difficult areas:
co-ordinatedmode (left), thewheels turn in opposition offeringan enhanced turning radius, and
synchronisedmode (right), which allows the vibrator tomove ina sideways direction, often referred to
as ‘crabbing’.
Figure 4.
PAM towedarray entanglement with lead‑in.


